تابع هزینه (Loss Functions) در GeoAI: قطبنمای یادگیری ماشین در دادههای مکانی
نویسنده: فاطمه جعفری نوبخت
در قلب هر مدل یادگیری عمیق (Deep Learning)، یک تابع هزینه یا Loss Function قرار دارد. این تابع، مسئولیت اندازهگیری فاصله بین “پیشبینی مدل” و “واقعیت زمینی” (Ground Truth) را بر عهده دارد. در حوزه GeoAI (ترکیب GIS و هوش مصنوعی)، انتخاب تابع هزینه مناسب چالشبرانگیزتر از سایر حوزههاست، زیرا دادههای مکانی دارای ویژگیهای منحصربهفردی مانند عدم تعادل کلاسها (Class Imbalance)، وابستگی فضایی و اشکال هندسی پیچیده هستند.
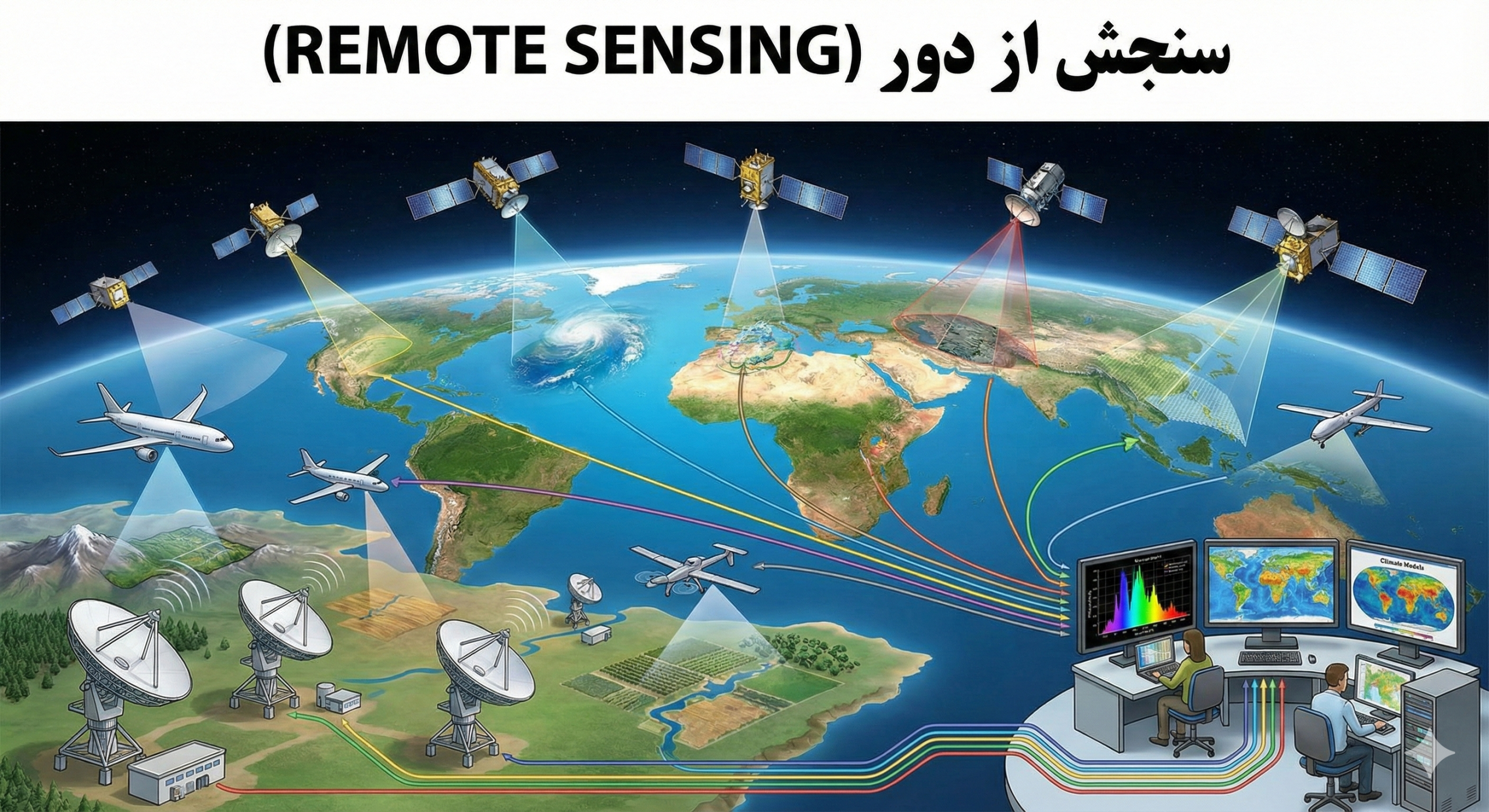
این مقاله به بررسی تخصصی توابع هزینه در تحلیل تصاویر ماهوارهای، نقشهبرداری خودکار و پیشبینیهای محیطزیستی میپردازد.
1. چرا توابع هزینه استاندارد در GeoAI کافی نیستند؟
در بینایی ماشین (Computer Vision) معمولی، تشخیص یک گربه در تصویر هدف است. اما در GeoAI، ما با چالشهای زیر روبرو هستیم:
-
عدم تعادل شدید کلاسها (Class Imbalance): اگر بخواهید ساختمانهای کوچک را در یک تصویر ماهوارهای بزرگ از بیابان تشخیص دهید، ۹۹٪ پیکسلها “پسزمینه” (بیابان) و تنها ۱٪ “ساختمان” هستند. توابع هزینه معمولی (مثل Cross-Entropy) به مدل اجازه میدهند با پیشبینی همه پیکسلها به عنوان “بیابان”، به دقت ۹۹٪ برسد، در حالی که هیچ ساختمانی را پیدا نکرده است!
-
اهمیت هندسه و توپولوژی: در نقشهبرداری جادهها، اگر مدل یک جاده را با چند پیکسل فاصله پیشبینی کند اما اتصال جاده قطع شود، مدل از نظر عملکردی شکست خورده است، حتی اگر خطای پیکسلی کم باشد.
-
تنوع مقیاس: اشیاء در تصاویر هوایی (مثل خودروها در برابر استادیومها) دارای ابعاد بسیار متفاوتی هستند.
2. دستهبندی توابع هزینه در GeoAI
ما میتوانیم توابع هزینه را بر اساس نوع کاربرد در GeoAI (رگرسیون، طبقهبندی، و قطعهبندی معنایی) تقسیم کنیم:
1.2. توابع مبتنی بر پیکسل (Pixel-based Loss)
این توابع هر پیکسل را به صورت مستقل بررسی میکنند.
-
آنتروپی متقاطع (Cross-Entropy Loss – CE):
-
کاربرد: طبقهبندی کاربری اراضی (Land Use/Land Cover) زمانی که کلاسها نسبتاً متعادل هستند.
-
عملکرد: توزیع احتمالی پیشبینی شده را با واقعیت مقایسه میکند.
- فرمول:
L_{CE} = -\sum_{c=1}^{M} y_{o,c} \log(p_{o,c})
-
نقد: در برابر عدم تعادل کلاسها (مثلاً تشخیص جادههای باریک) ضعیف عمل میکند.
-
-
میانگین مربعات خطا (Mean Squared Error – MSE):
-
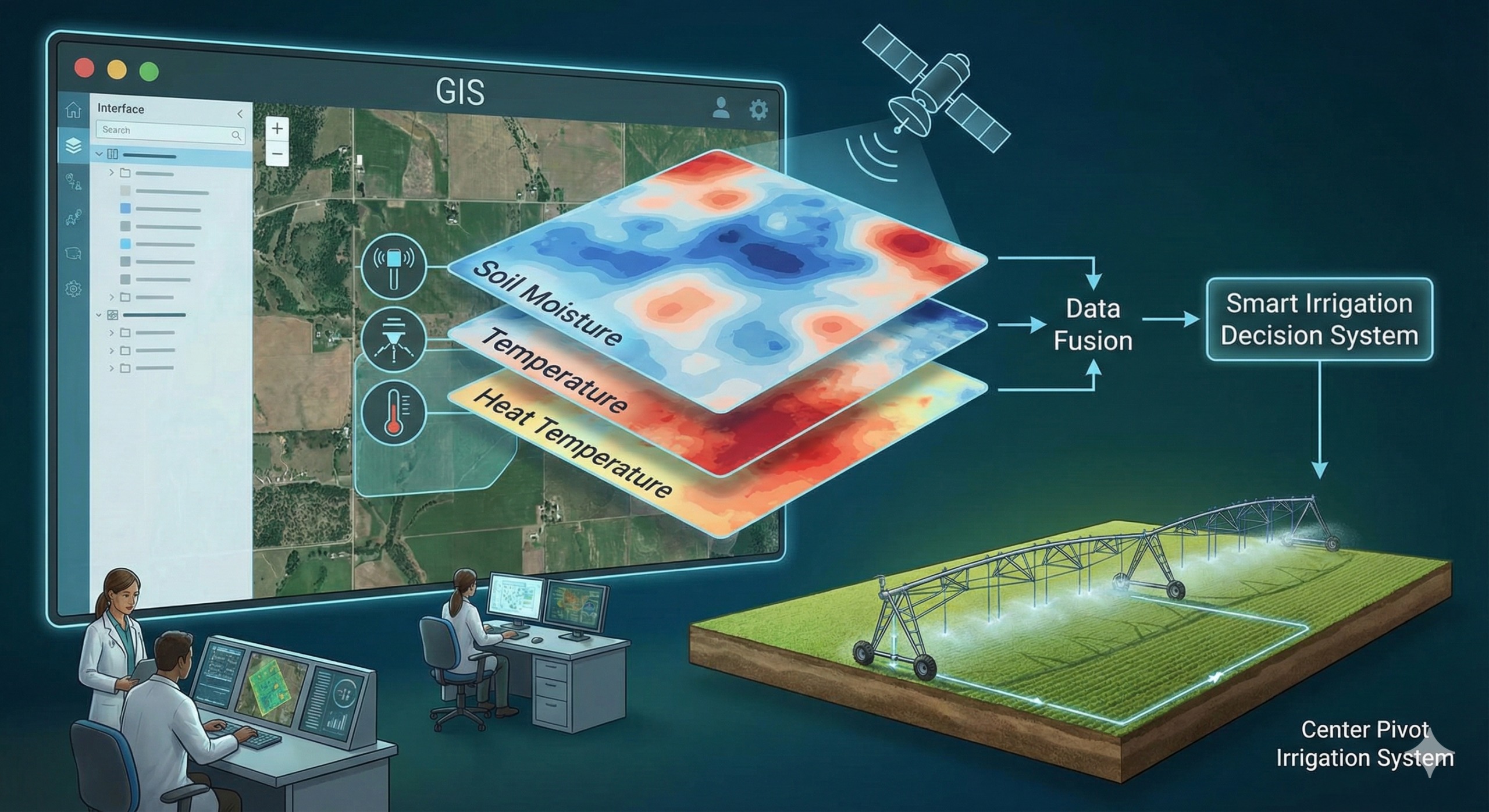
کاربرد: مسائل رگرسیون مکانی، مانند پیشبینی ارتفاع (DEM)، تخمین تراکم جمعیت، یا پیشبینی میزان آلودگی هوا.
- فرمول:
L_{MSE} = \frac{1}{N} \sum_{i=1}^{N} (y_i – \hat{y}_i)^2
-
2.2. توابع مبتنی بر همپوشانی (Overlap-based Loss)
این توابع برای قطعهبندی معنایی (Semantic Segmentation) حیاتی هستند و بر میزان اشتراک بین ماسک پیشبینی شده و ماسک واقعی تمرکز دارند.
-
توابع Dice Loss و IoU Loss:
-
کاربرد: استخراج ردپای ساختمانها (Building Footprints) و تشخیص تغییرات (Change Detection).
-
مفهوم: این توابع مستقیماً متریکهای ارزیابی IoU (Intersection over Union) را بهینهسازی میکنند. حتی اگر ۹۰٪ تصویر پسزمینه باشد، این توابع فقط بر روی ناحیه اشتراک شیء مورد نظر تمرکز میکنند.
- فرمول Dice:
L_{Dice} = 1 – \frac{2 \times |A \cap B|}{|A| + |B|}
-
در اینجا A پیشبینی مدل و B واقعیت زمینی است.
-
۳. توابع تخصصی برای دادههای نامتعادل (Distribution-based Loss)
این توابع “بازی را تغییر میدهند” و برای تشخیص اشیاء کمیاب در تصاویر بزرگ (مانند کشتیها در اقیانوس) طراحی شدهاند.
-
Focal Loss:
-
کاربرد: تشخیص اشیاء کوچک یا نادر.
-
مکانیزم: این تابع ضریبی به Cross-Entropy اضافه میکند که وزن نمونههای “آسان” (مانند پسزمینه وسیع آب یا جنگل) را کم کرده و تمرکز مدل را روی نمونههای “سخت” (اشیاء کوچک) میگذارد.
- فرمول:
L_{FL} = -(1-p_t)^\gamma \log(p_t)
-
پارامتر $\gamma$ تعیین میکند که مدل چقدر باید روی نمونههای سخت تمرکز کند.
-
-
Tversky Loss:
-
یک تعمیم از Dice Loss است که به ما اجازه میدهد وزنهای متفاوتی به موارد “مثبت کاذب” (False Positive) و “منفی کاذب” (False Negative) بدهیم. این برای زمانی عالی است که “پیدا نکردن یک ساختمان” هزینه بیشتری نسبت به “اشتباه گرفتن یک سنگ با ساختمان” داشته باشد.
-
۴. توابع آگاه از هندسه و مرز (Boundary/Topology-aware Loss)
جدیدترین نسل توابع هزینه در GeoAI که برای حفظ شکل صحیح عوارض طراحی شدهاند.
-
Boundary Loss:
-
مشکل: توابع معمولی معمولاً لبههای ساختمانها را تار یا گرد میکنند.
-
راه حل: این تابع فاصلهی بین مرزهای پیشبینی شده و مرزهای واقعی را محاسبه کرده و بهینهسازی میکند. نتیجه نهایی، ساختمانهایی با گوشههای تیز و دقیقتر است.
-
-
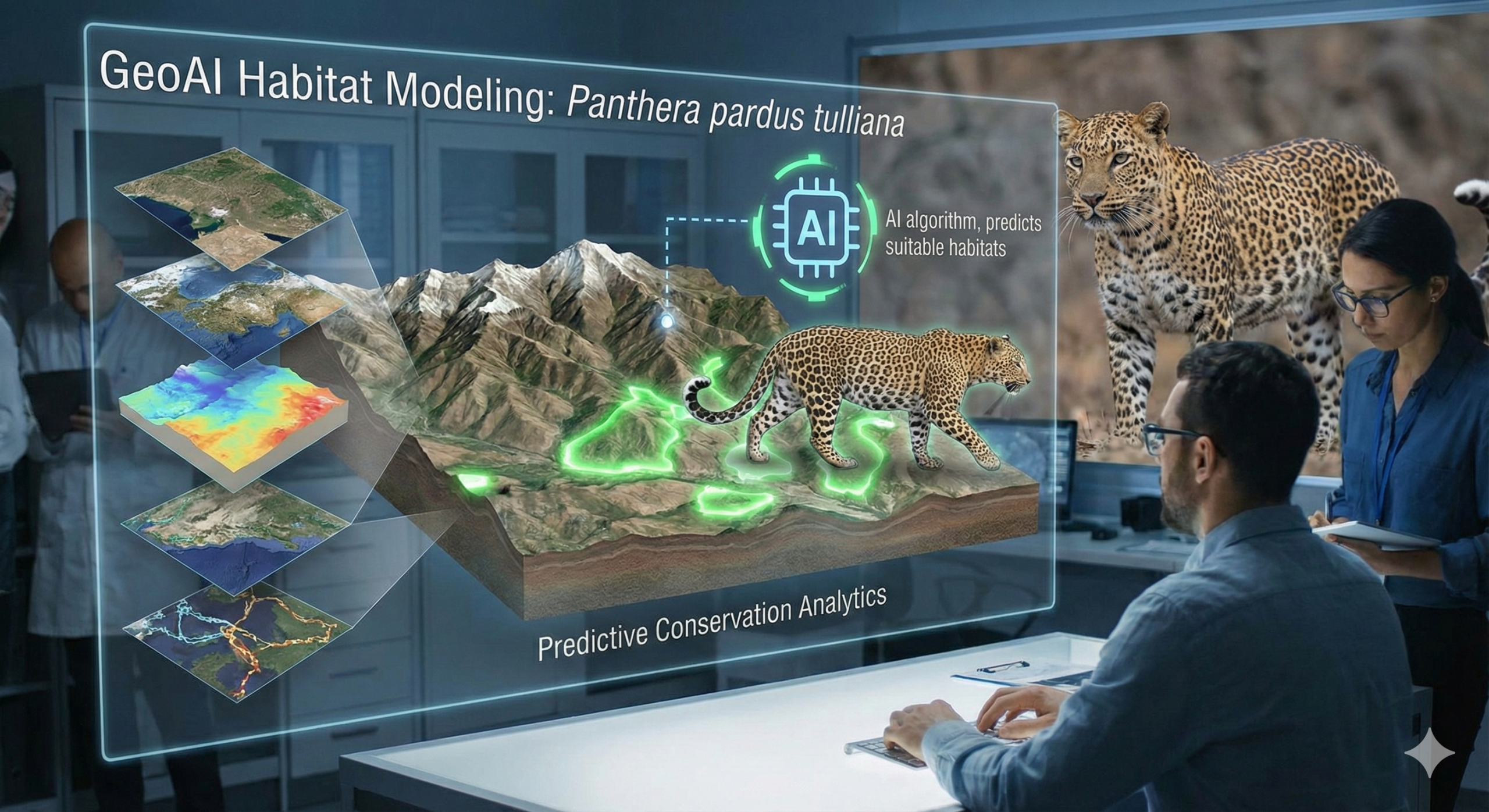
Topo-Loss (Topology Loss):
-
کاربرد: استخراج شبکه جادهها و رودخانهها.
-
هدف: اطمینان از اینکه شبکه جادهها متصل باقی میماند و تکه تکه نمیشود (حتی اگر از نظر پیکسلی خطای کمی داشته باشیم، قطع شدن جاده در مسیریابی فاجعه است).
-
5. جدول مقایسه کاربردی
| نوع مسأله GeoAI | مثال کاربردی | تابع هزینه پیشنهادی | دلیل انتخاب |
| طبقهبندی چندکلاسه | نقشه پوشش گیاهی (جنگل، آب، شهر) | Categorical Cross-Entropy | کلاسها نسبتاً متعادل هستند. |
| قطعهبندی نامتعادل | تشخیص پنلهای خورشیدی در دشت | Focal Loss | هدف بسیار کوچک و پسزمینه بسیار وسیع است. |
| استخراج عوارض | استخراج ردپای ساختمانها | Dice Loss + BCE | ترکیب دقت پیکسلی و همپوشانی هندسی. |
| استخراج شبکه خطی | استخراج جاده از عکس هوایی | Dice + Topology Loss | حفظ پیوستگی خطوط جاده حیاتی است. |
| رگرسیون مکانی | تخمین عمق آب (Bathymetry) | MSE یا Huber Loss | دادهها پیوسته هستند و Huber در برابر نویز مقاوم است. |
6. نتیجهگیری
در GeoAI، “یک نسخه برای همه دردها” وجود ندارد. انتخاب تابع هزینه (Loss Function) باید مستقیماً با ماهیت پدیده جغرافیایی که مدلسازی میکنید، مرتبط باشد:
-
آیا به دنبال دقت در لبهها هستید؟ Boundary Loss.
-
آیا دادههای شما پر از فضای خالی است؟ Focal Loss.
-
آیا شکل هندسی مهم است؟ IoU/Dice Loss.
ترکیب توابع هزینه (مثلاً جمع وزندار Dice و Cross-Entropy) اغلب بهترین نتایج را در پروژههای پیچیده سنجش از دور و GIS به دست میدهد.